This is with our logic probe grounded. Note the led is off showign that there is no current even though our other led is still on showing that there is current though that part of the circuit.

Here we have the light working with out bligging in our probe. note how bright the led is.

This is just the back part showing our connections for the comonents.

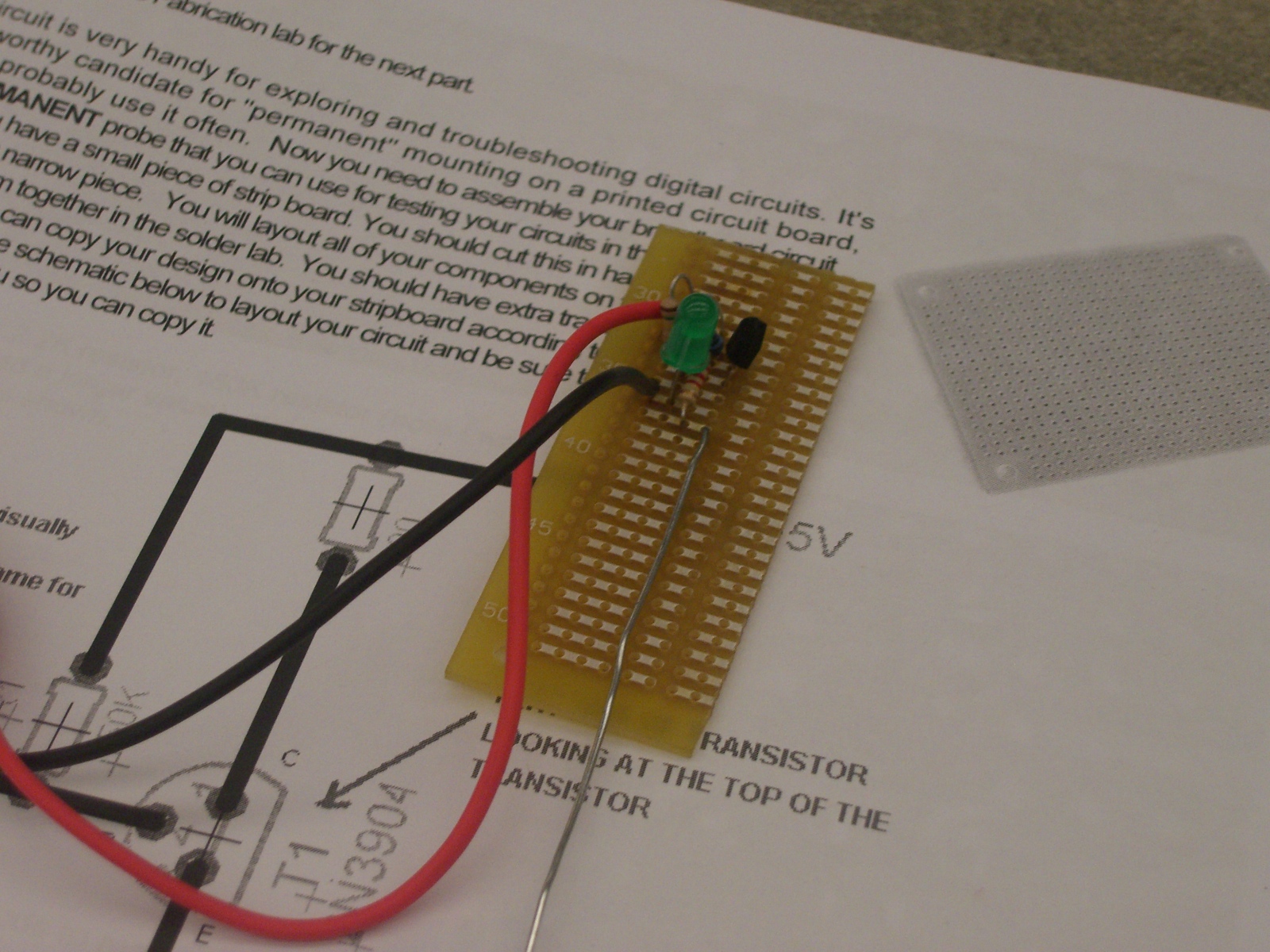
This is the final product of our test probe with all our parts intirgrated.

Here we are grounded and thus no current flows though the circuit.

Here we see tht when inserting the probe(green wire) we have the light bulb illuminate brightly when the amount current goes though the resistors.

This is the prototype for our logic probe that will test if there is connectivity between parts.

Here we are using a potnetimator (1M ohm) along with other reisisotrs to demonstrante the amount of current needed to light the light bulb.

This picture is very blurry but we can see that when the button is pushed the light goes on thus allowing current to flow though/

Here we are demonstrating that when using a transistors (NPC) that the base takes in a low current to allow flow from though the circuit.